
Date: 12/31/12
Location: Tony’s House
Main Purpose: Decide the situation for robot, start robot work for the World Festival
Location: Tony’s House
Main Purpose: Decide the situation for robot, start robot work for the World Festival
General/Other:
- We trained the members of the second team on robot
o We showed them certain online videos and pointed out traits that made robots effective and accurate
o We went through their robot and attachments, and pointed out improvements that would increase the effectiveness and accuracy within the robot game
Robot:
- After some discussion we decided to rebuild Brick (our current robot that we’ve been using for competition).
- This decision was made mainly because of the following:
o Wheels issue (wheels keep on wearing off)
o Light guard issue (gets caught on mat)
o Ultrasonic sensor usage (lack of usage in the season)
- In the new robot, the following changes will be made:
o Usage of the small green wheels (~75 cents per wheels)
o Get rid of ultrasonic sensor
o Place two touch sensors in the back (backing up on walls)
o Create a better attachment mechanism (make a switch that activates wand, built into the robot)
- We matched the motors yet again (see August 9 entry for detail), and found the two motors that were the most similar to each other.
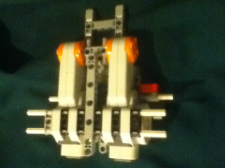
- Version 3 of the robot, named “Tank,” was started, and the main central bracing was finished.
o The motors of Tank are closer to each other than in Brick, which allows the placement of two touch sensors (one per side)
o Tank is planned to be the exact same width as Brick, to avoid any problems with width, as happened in Version 1.
- We trained the members of the second team on robot
o We showed them certain online videos and pointed out traits that made robots effective and accurate
o We went through their robot and attachments, and pointed out improvements that would increase the effectiveness and accuracy within the robot game
Robot:
- After some discussion we decided to rebuild Brick (our current robot that we’ve been using for competition).
- This decision was made mainly because of the following:
o Wheels issue (wheels keep on wearing off)
o Light guard issue (gets caught on mat)
o Ultrasonic sensor usage (lack of usage in the season)
- In the new robot, the following changes will be made:
o Usage of the small green wheels (~75 cents per wheels)
o Get rid of ultrasonic sensor
o Place two touch sensors in the back (backing up on walls)
o Create a better attachment mechanism (make a switch that activates wand, built into the robot)
- We matched the motors yet again (see August 9 entry for detail), and found the two motors that were the most similar to each other.
- Version 3 of the robot, named “Tank,” was started, and the main central bracing was finished.
o The motors of Tank are closer to each other than in Brick, which allows the placement of two touch sensors (one per side)
o Tank is planned to be the exact same width as Brick, to avoid any problems with width, as happened in Version 1.
